
Technical visualization of a microfluidic platform evolving from concept to scalable system
HUMAN ORGAN SYSTEM ON-A-CHIP (HOS)
Over a three-year period at Draper, I developed technical animations and visualizations to support the evolution of the Human Organ System (HOS)—a microfluidic platform designed to simulate human tissue behavior. Working closely with engineers and industrial design, I translated complex CAD-driven systems into clear visual narratives as the platform scaled from early prototypes to the high-throughput PREDICT96 system.


Early System Development
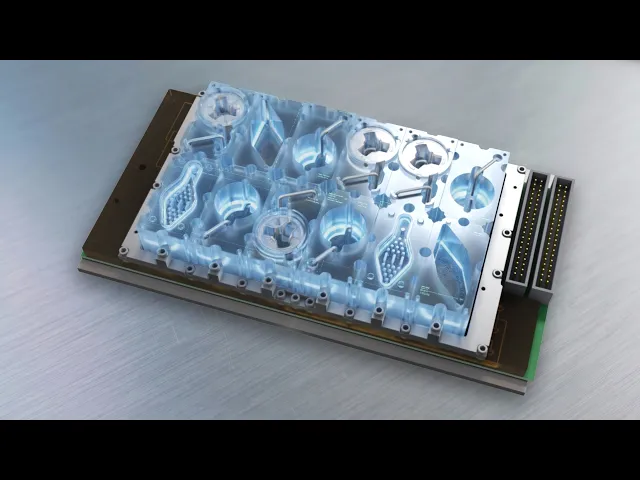
The Human Organ System (HOS) began as a microfluidic platform designed to simulate human tissue behavior within a controlled environment. Fluid is directed through precisely engineered channels, enabling researchers to observe how cells respond to drugs, nutrients, and external stimuli in real time.
Early system configurations focused on smaller-scale testing, with individual units functioning as independent experimental environments. These foundational designs established the core architecture for flow control, channel routing, and biological interaction that would later scale into more complex systems.
System Behavior & Structure
At the microscale, system performance is defined by precise control over fluid behavior. Channel geometry and flow paths are designed to maintain stable, laminar conditions, ensuring consistent and predictable interactions within each test environment.
Each unit operates as a self-contained system, allowing multiple experiments to run in parallel under controlled conditions. This structure enables researchers to isolate variables while maintaining uniformity across the platform.
Visualizing these systems required balancing clarity with accuracy—simplifying complex assemblies while preserving the essential relationships between components, materials, and flow behavior.




Scaling the System
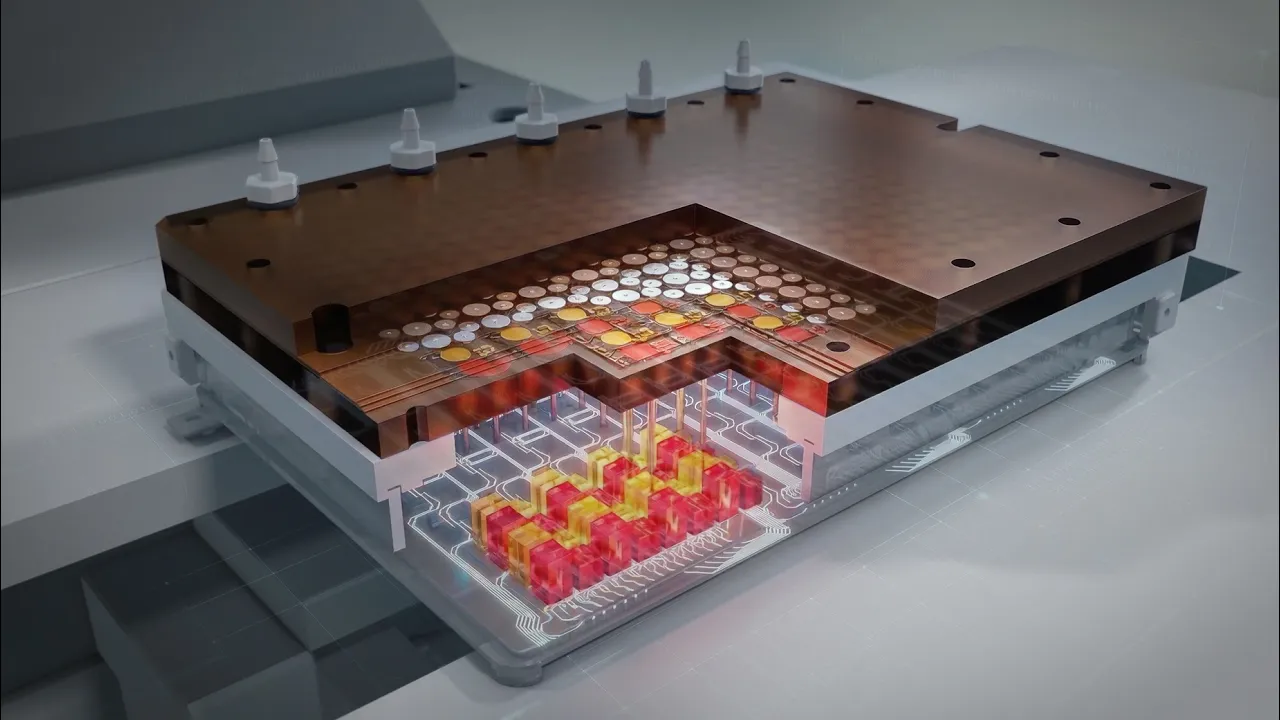
As the platform evolved, the system expanded from small-scale prototypes into a high-throughput architecture capable of supporting 96 simultaneous experiments. This transition introduced new challenges in maintaining consistency, flow distribution, and system uniformity across all units.
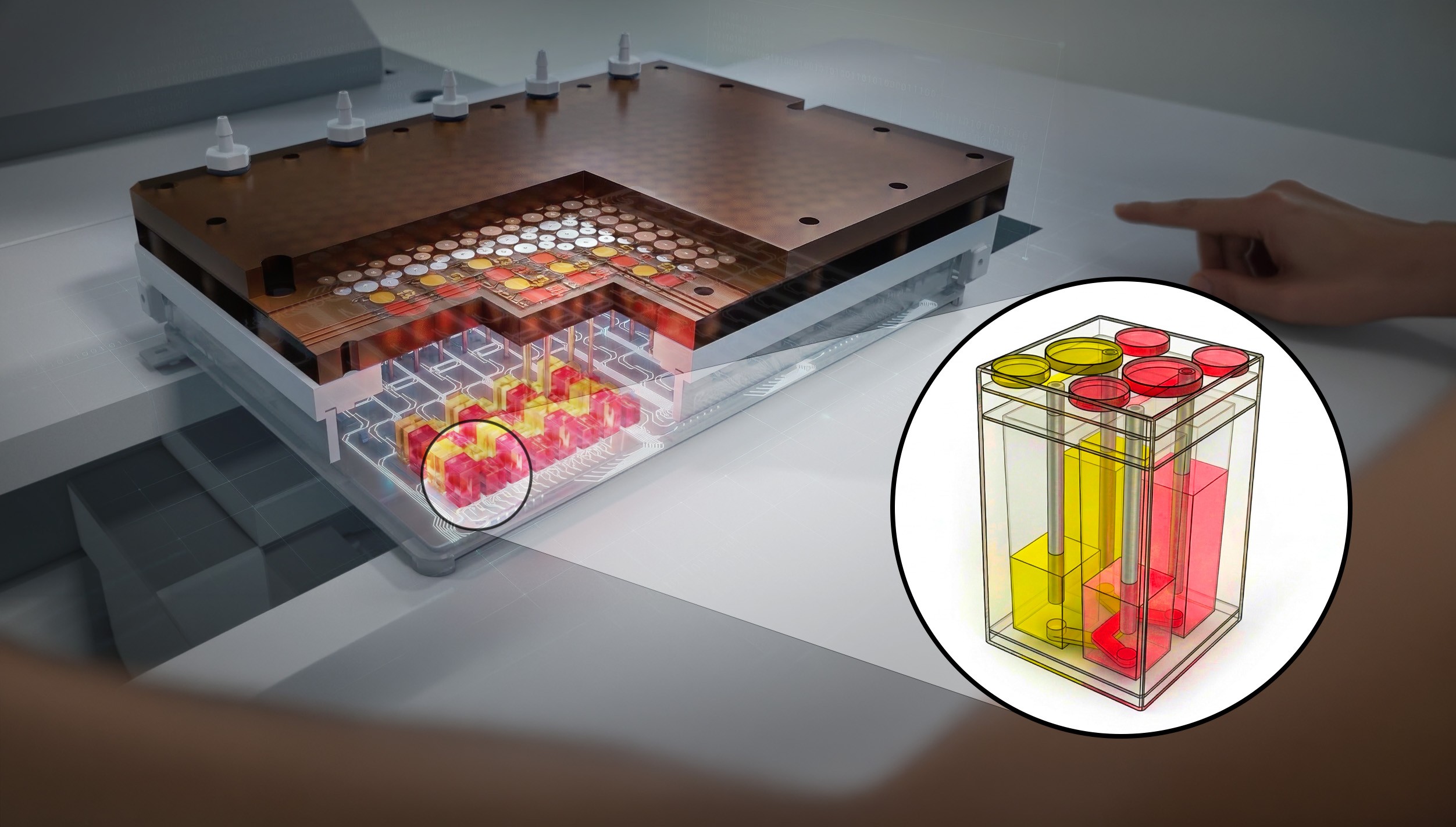
The resulting platform, PREDICT96, integrates multiple independent microfluidic systems within a single device, enabling large-scale experimentation while preserving the precision required at the microscale.
This shift from concept to scalable system marked a critical step toward real-world application, transforming the platform into a viable tool for drug discovery and development.





Technical Visualization & Workflow
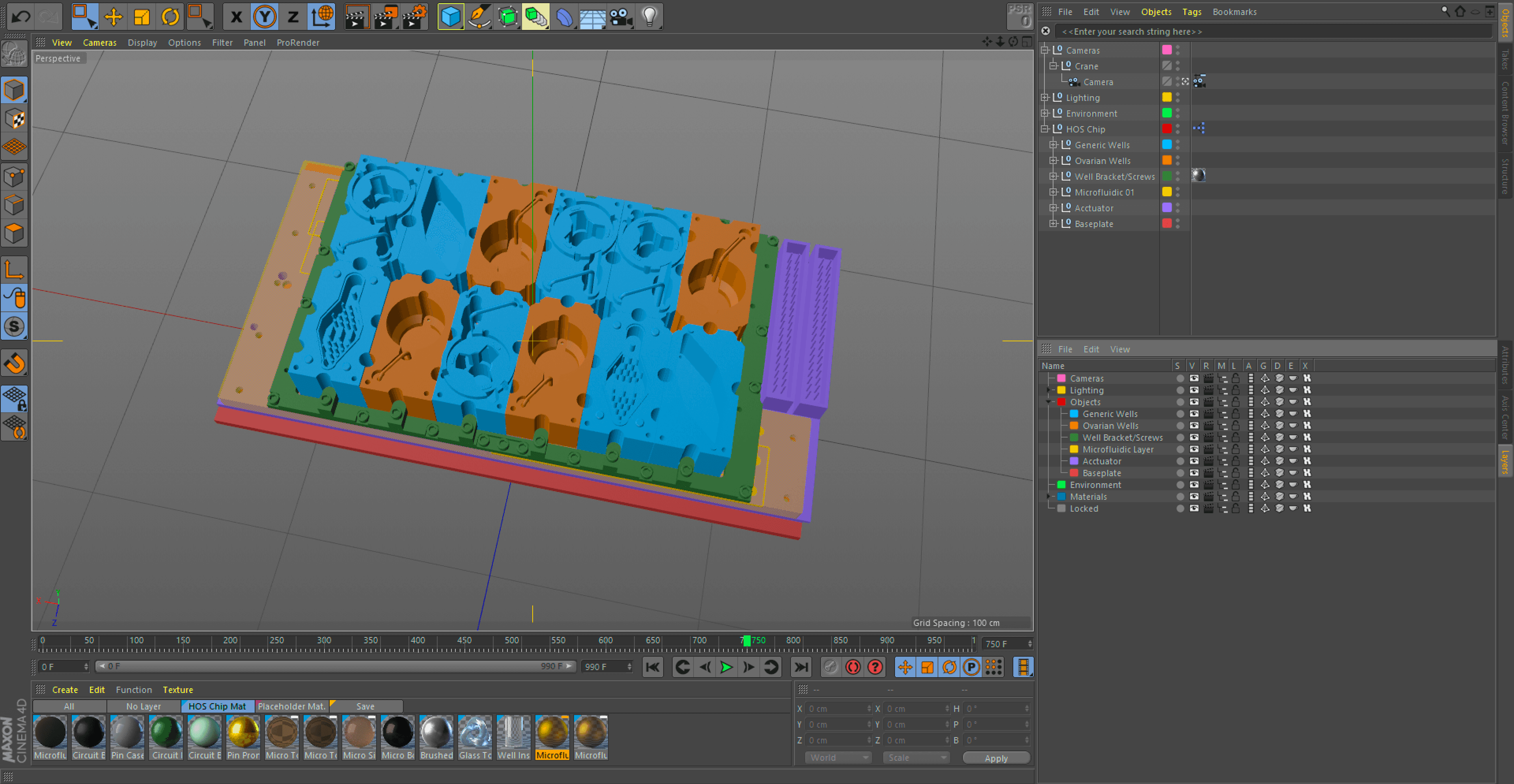
All visualizations were developed in Cinema 4D using engineering-provided CAD data. Complex SolidWorks assemblies were rebuilt and optimized to create production-ready assets suitable for animation and rendering.
Key components, including the microfluidic wells, were retopologized to improve surface continuity, refraction accuracy, and UV control. Simplifying and restructuring dense CAD geometry allowed for more stable animation and reduced rendering artifacts while maintaining technical fidelity.
The workflow involved close collaboration with engineering and industrial design, integrating assets across SolidWorks, Rhino, and Cinema 4D to support the system’s evolution from early prototypes to final product.
These visualizations were used across internal development, stakeholder presentations, and external communication, helping translate complex systems into clear and accessible visual narratives.
Details | ||||
|---|---|---|---|---|
Client: | Draper | |||
Date: | 2016-2019 | |||
Website/Link: | ||||
*This project relates to Draper’s HOS platform. My role focused on visualization and animation.
| ||||